An IMU sensor is abbreviated as Inertial Measurement unit sensors.
Purpose of IMU is to measure the specific force on a body or it rotational motion or its orientation.
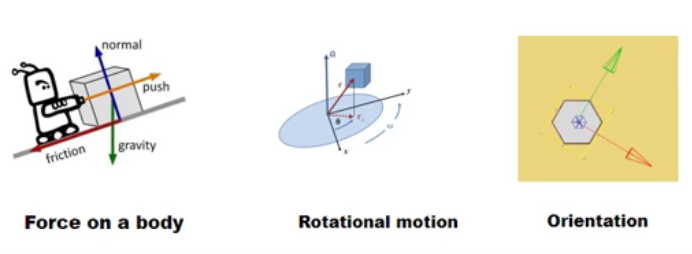
It is main component of navigation system used in aircraft’s, drones to make the IMU; we need a combination sensor like accelerometers, gyroscope, and magnetometer. An IMU is a specific type of sensor that measures angular rate, force and sometimes magnetic field.
Your USRP-E Series device has an on board IMU that provides 9 axis (Gyro, Accelerometer and compass) functionality.
Once the devices is interfaced using Ethernet connection or using serial connection , then type the following commands to verify the change in the physical parameters.
Command 1:
An accelerometer is designed to measure non-gravitational acceleration. When the object moves from stationary position to any velocity, the accelerometer responds to the vibrations associated with such movement. It uses microscopic crystals that go under stress when vibrations occur, and from that stress a voltage is generated to create a reading on any acceleration.
Type the command mention bellow in order to verify and analyze the accelerometer sensors.
$ RTIMULibDrive
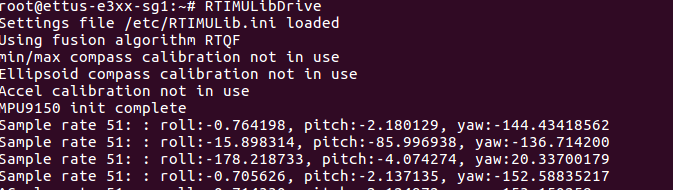
It will print the current accelerometer values on the console. This command is used to measure the accelerometer in terms of roll, pitch and yaw parameters where
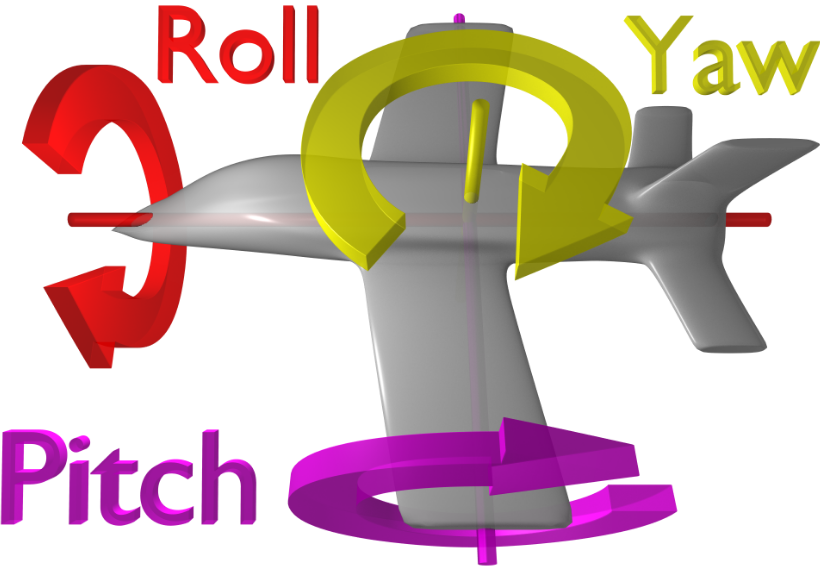
• Rotation around the front-to-back axis is called roll.
• Rotation around the side-to-side axis is called pitch.
• Rotation around the vertical axis is called yaw.
Command 2:
To launch the IMU calibration procedure, run:
$ RTIMULibCal
And follow the onscreen instructions. Please note that magnetometer calibration is important to obtain sensible results if the IMU is to be used in sensor fusion applications.
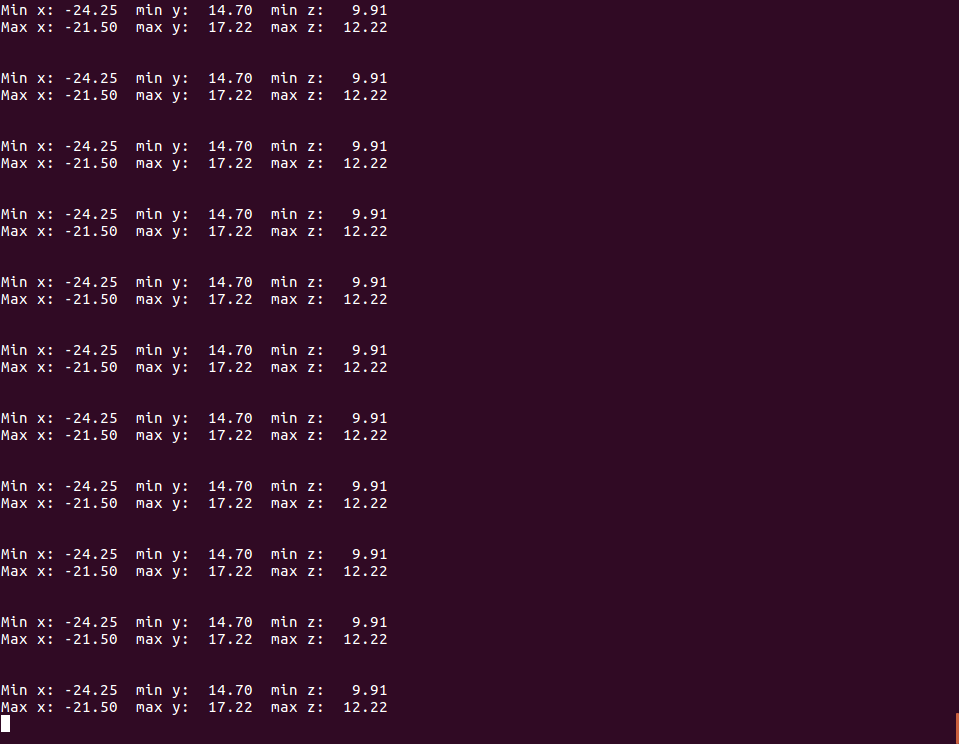
If option “m” is selected, then it will display the calibrated results with the magnetometer sensors having maximum and minimum value as shown below:
If the option “a” is selected, then it will display the calibrated results of accelerometers sensors as shown below:

Initially it will be disabled. Once the “e” key is pressed, the current axis: x will get enabled as shown below:

Command 3:
Using X11 forwarding over SSH a complete sensor fusion application can be run over SSH from a host computer by typing
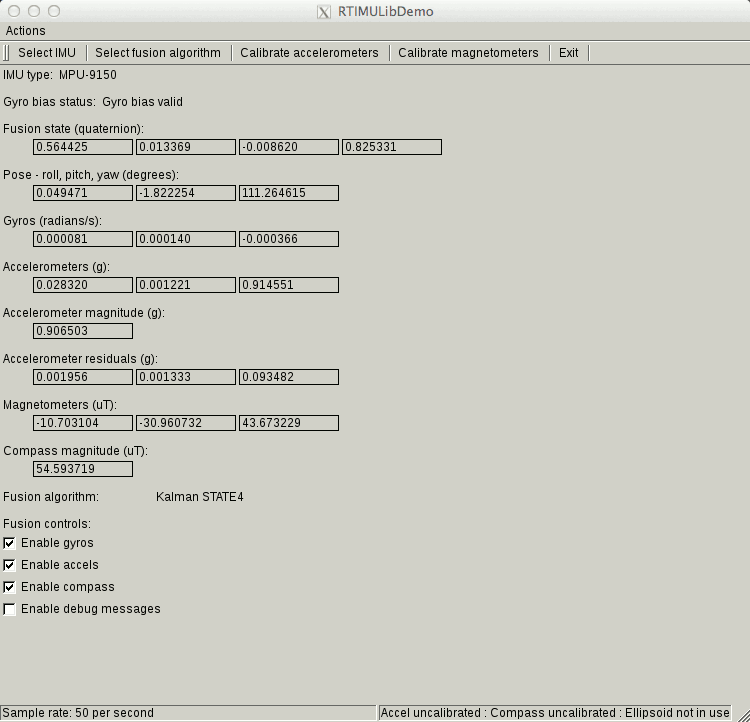
$ RTIMULibDemo
This should open a graphical window on the host computer that displays the various outputs of the IMU, as well as quaternion measurements based on different sensor fusion algorithms.